于2021年8月10日,由“智能机器人”国家重点研发计划项目“生-机智能交互与生机电一体化机器人技术”(2017YFB1300300)的牵头单位--天津大学,以线上会议的形式,对项目的五个课题组织了绩效评价会仪。我校yl23455永利机器人与智能系统研究所生机电融合与服务机器人队在“智能机器人”国家重点研发计划项目“生-机智能交互与生机电一体化机器人技术”中负责的课题三“面向功能替代的多模运动信息融合与识别技术研究”(2017YFB1300303)顺利通过课题绩效评价。评价专家组由来自首都医科大学的杨旗教授、北京大学的王源教授、天津医科大学的郑旭媛教授、河北工业大学的徐桂芝教授、南开大学的张涛教授、北京邮电大学的刘勇教授、电子科技大学的徐鹏教授和华南理工大学的俞祝良教授等八名专家组成,杨旗教授担任专家组组长。

图1课题绩效评价会议线上合影
我校yl23455永利机器人与智能系统研究所生机电融合与服务机器人团队负责人张小栋教授应邀参加了会议,作为该项目课题三“面向功能替代的多模运动信息融合与识别技术研究”(2017YFB1300303)的负责人,向课题绩效评价专家组,就课题目标和考核指标完成情况、主要研究成果及创新点、代表性成果及示范推广情况、组织管理及人才培养等情况,以及经费执行情况进行了40分钟PPT详细汇报。
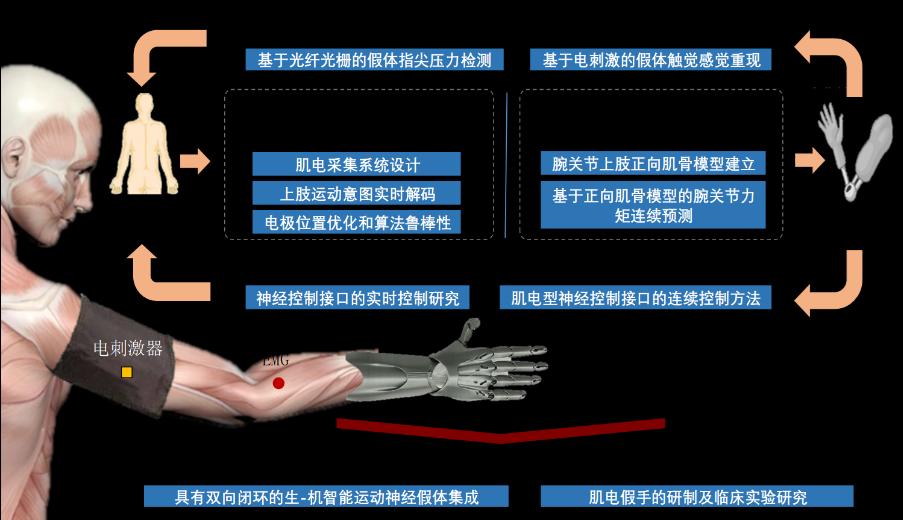
图2课题三的研究概略
课题绩效评价专家组,在认真审查相关课题资料、听取课题负责人汇报的基础上,还对课题绩效评价成果进行了近20分钟的详细质询,最后经过专家组个人独立打分与闭门集体讨论,形成了课题三绩效评价结果为“通过”。同时,专家组认定课题三的创造性成果主要包括:①基于上肢肌电信号的拾取,采用集成学习算法,实现了对假手由4种手势、5种腕关节角度和3种负载组成的60种上肢复合动作意图的正向解码;②基于LSTM网络,同步采集连续动作下的肌电信号与腕关节角度信息,通过正向肌骨模型,建立了肌电与关节力矩之间的联系,实现了腕关节力矩的连续预测;③研究了光纤光栅的触觉检测技术,完成了假体指尖压力传感器的开发与制备,并能用于假手的触觉反馈;④提出基于电刺激的反向感觉通路重建策略,完成了电刺激器的下位机软硬件开发,实现了假手触觉的电刺激在体反馈与感觉重现;⑤提出一种肌电型神经控制接口的连续控制方法和假手自适应抓取控制策略,实现了24种操作模式的实时控制。八名专家对课题三的打分均在90分以上,此为课题赢得结题优秀提供了保证。
