2021年8月27日,由“智能机器人”国家重点研发计划项目“负重及搬移托举助力外骨骼机器人关键技术研究及典型应用验证”(2017YFB1300500)的牵头单位--北京理工大学牵头组织,以线上线下结合,并设立北京和西安两个线下分会场,对项目的五个课题进行了绩效评价。评价专家组由来自中国科学院沈阳自动化所的刘连庆研究员、北京航空航天大学的陈殿生教授、清华大学的季林红教授、中国科学院深圳先进技术研究院的吴新宇研究员、陆军研究院通用装备研究所的王丽娜高工、华中科技大学的严思杰教授、西北工业大学的刘更教授、长安大学的张新荣教授八名专家组成,刘连庆研究员担任专家组组长。

图 1 课题绩效评价会议(西安线下会场)

图 2 专家现场考察助力效率测试系统
西北工业大学刘更教授,长安大学张新荣教授,以及yl23455永利yl23455永利机器人与智能系统研究所副所长、生机电融合与服务机器人团队负责人张小栋教授出席了西安分会场评审会议。我院生机电融合与服务机器人团队朱爱斌副教授应邀参加了课题绩效评价会议,并作为该项目课题五“外骨骼机器人人体意图感知及助力效率测试技术研究”(2017YFB1300505)的负责人,向课题绩效评价专家组,就课题总体进展情况、取得的重要进展及成果、课题成果完成情况、组织实施管理及经济社会效益等情况进行了PPT详细汇报和现场演示汇报。
1")
图 3 外骨骼机器人人体意图感知及助力效率测试技术研究的研究概略
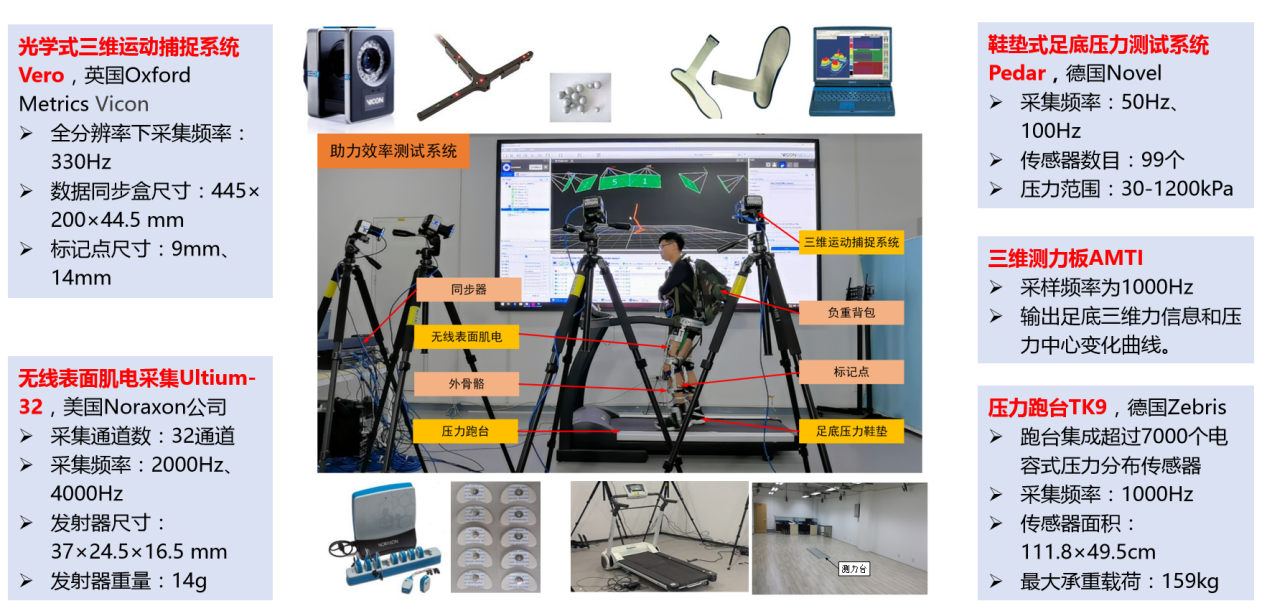
图 4 项目课题组搭建的外骨骼机器人助力效率测试系统
课题绩效评价专家组在认真审查相关课题资料、听取课题负责人汇报、现场考察助力效率测试系统的基础上,还对课题绩效评价成果进行了详细质询,专家组认定课题五的创造性成果主要包括:①研究了基于表面肌电数据、人体运动学和动力学数据的人体关节力矩测试技术,构建了关节力矩测试系统并开展了关节力矩测试实验;②研究了基于脑肌信息的运动融合感知的人体运动意图感知校准技术,搭建了人体下肢运动意图感知系统并进行了实验验证,形成了人体运动意图感知校准方法;③研究了基于多传感器融合的外骨骼机器人助力效率测试方法,形成了助力效率测试指标体系及表征方法;④研发了外骨骼机器人助力效率测试系统并制定了行业的测试标准草案,验证了助力效率测试方法;⑤搭建了国际领先的外骨骼助力效率测试系统,完成了表面肌电信号采集频率4000HZ、人体膝关节主动力矩不少于40N.m以4km/h速度行走时外骨骼机器人的助力效率测试。相关研究成果已经通过了专家评测和有资质的第三方检测。
最后经过绩效评价专家组个人独立打分与闭门集体讨论,“智能机器人”国家重点研发计划项目“外骨骼机器人人体意图感知及助力效率测试技术研究”课题绩效评价为顺利通过,为本项目课题赢得结题优秀,争取未来国家重点研发计划项目的进一步支持提供了坚实的基础和保证。
