讲座时间:
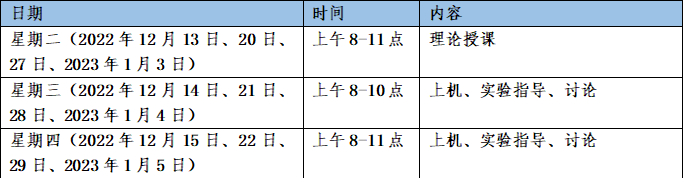 方式:线上线下结合
方式:线上线下结合
线下地点:创新港2-2141医工交叉研究平台实验室
腾讯会议:528-023-6219 (密码:270745)
讲座人简介:

陈朝阳现任美国密西根州韦恩州立大学(WSU)生物医学工程系教授,机器人康复工程实验室主任,博导;底特律医学中心(DMC)骨科与运动医学学院科学家、研究主任;密歇根州立大学骨疗学院(MSU-COM)临床副教授。2017国际医学图像与信号处理会议程序委员会主席。2018生物医学工程协会年会辅助技术会场主席。2019年第8届计算与模式识别国际会议(ICCPR 2019)程序主席和ICCPR2020年宣传主席。主管DMC骨科与运动医学学院的科学研究,包括生物力学实验室(应用材料测试机测量新手术材料外科技术修复组织损伤后的生物力学特性)、机器人康复实验室、人工智能实验室、步态实验室、投射实验室。多次在国际学术会议获奖。发表SCI学术论文100余篇,它引1576次。与yl23455永利合作开展脑机接口脑电信号控制外骨骼机械上臂研究(2016-2019)以及机器人辅助中风后手部运动功能神经环路康复(2019-)、 融合多源运动交互信号的上肢康复机器人自适应阻抗控制关键技术研究与应用(2020.1-)。陈朝阳老师具有医学背景,在过去近十年中,陈朝阳带领的团队在生机电一体化及智能机器人领域取得了一定研究成果,发表SCI学术论文100余篇,它引1576次。双方具有很好的互补性,从2016年开始合作,多次互访交流,合作申请项目,联合指导研究生,开设研究生课程,共同组建陕西省数字医疗器械与仪器国际联合研究中心,已共同发表SCI论文十余篇。
讲座介绍:
本课程介绍神经信号与神经结构学的基本概念、医用机器人工程基本思路、以及未来发展趋势。其目的在于让学生掌握神经信号处理方法,了解用于人工智能中机器学习的信号模式识别与处理方法,了解实用性随意念机器人控制技术的当前研究最新进展。课程主要内容包括:神经系统与神经生理学中的神经信号产生和传导、周围神经感觉及运动功能,脑电波(脑电图)的主要特征, 肌肉收缩生物电信号特征;生物电信号记录、 处理和分析; 微处理器控制步进电机的基本构架。 医学机器人与相关技术在康复工程中的应用。 生机信号接口中植入式电极的研究概况,包括石墨稀表面微结构阵列电极与其它电极的应用,及感觉与运动功能的机械人手构建原理等。
培养目标:培养康复机器人学方面,与脑科学相关的人工智能与高端制造产业方面的研发人才。为机械工程人员增添必要而且直接的医学与神经科学知识,传统以及最新的人体生物电信号处理技术与方法(模式识别、图像处理、机器学习方法)。了解人体生物电信号特性并且用于机器人控制的方法,目前应用目标为临床医学治疗。学生课后有能力开展相关的前沿性课题研究,以此在随后3年内开展相关课题研究。
教学采用线上授课形式,共32学时,其中理论授课12学时,讨论2学时,上机5学时,实验8学时,其他5学时: 讨论未来一年内可以开展的研究内容,指导学生写作实验报告为写作SCI论文打基础。
主要理论授课内容及学时安排:
1)神经细胞膜电位: 离子通道,动作电位,局部反应,组织兴奋性,学时1
2)神经系统,中枢神经系统与周围神经系统, 神经系统里的细胞的结构与功能,学时1
3)神经电信号细胞间的传播, 突触间传导, 神经递质与受体,学时1
4)感觉器分类, 感觉器的生理功能,学时1
5)肌肉电信号与肌电图,学时1
6)脑电信号,学时1
7)人工智能/机器学习简介,学时1
8)肌电信号控制机器人外骨骼支架概论,学时1
9)脑机工程, 脑电波控制外骨骼系统,学时1
10)脑机接口: 电极发展过程,周围神经接口,周围肌肉接口 ,学时1
11)下肢外骨骼行走系统概况,学时1
12)新一代假肢手-具有感觉与运动功能的机械人手构建原理,学时1
考核方式与要求:开卷考试
助教同学:滕志程、杜成航、张超宙
